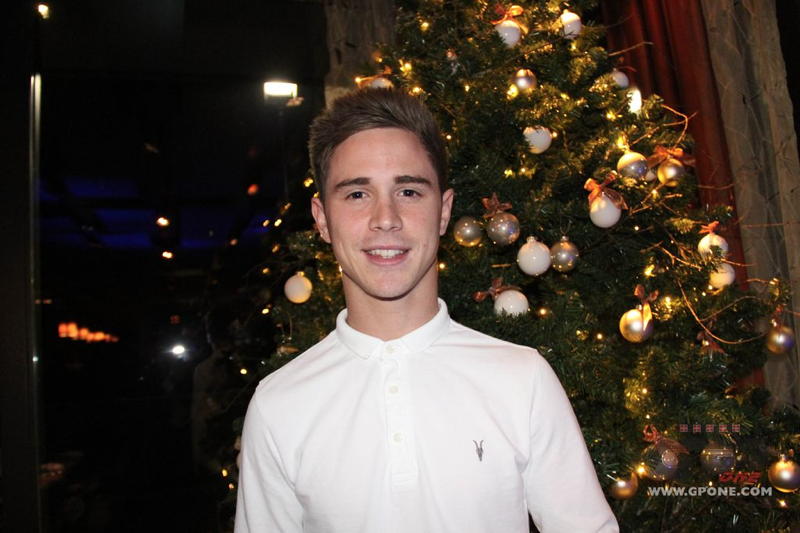
『ドゥカティ:シーズン中のエンジン開発?2016年はダメ』
[pe2-image src=”http://lh3.googleusercontent.com/-HQYr4feHHiE/Vm8lpjJVhjI/AAAAAAAAmc8/mxgWuu4Qkrw/s144-c-o/ducati-gpone.jpg” href=”https://picasaweb.google.com/111128335808353501766/GP201512#6228238205415949874″ caption=”” type=”image” alt=”ducati-gpone.jpg” ]
★モトGPクラスでは経費削減のため、シーズン開幕時よりエンジンの開発凍結をする規則になっている。
このため、2015年にホンダではアグレッシブすぎるエンジンを作ってしまったものの、もはやシーズン中に改良することは不可能だった。
★2016年よりモトGPクラスではファクトリーチームの使用エンジン数が7基に増える(※2015年は5基)。なお、開発凍結についてはそのままで、安全面に問題がある時を除き、シーズン閉幕するまで触ることはできない。
★同規則について、リヴィオ・スッポ氏(ホンダHRCチームマネージャー)が次のように話している。
「今後に向け、シーズン中でもエンジンの開発が1点か2点できるよう提案しようかと思ってるんですよ。チャンピオンシップのためにも、レースの見応えのことを考えても良い話でしょう。」
★同規則について、ジジ・ダッリーニャ氏(ドゥカティ・ゼネラルディレクター)が次のように話している。
「この件については、私はいつも前に進めようとしてきたんだが…ずっと日本メーカーらに阻止されてきたんですよ。以前から私は、シーズン中にエンジンのステップアップを1点か2点できるよう提案してきてるんだが…もはや2016年シーズンは動き出してしまっているし、規則を変えることはできないでしょ。
既に動き出しているシーズンの規則を変えるって言うのは実に奇妙なことだし、あまり喜ばしいとは言えないでしょう。ただ、2017年に向けてなら同件について他のメーカーらと討議してもいいとは思ってますよ。」
(2015年12月14日『Gpone』記事参照)
[amazonjs asin=”4779625122″ locale=”JP” title=”藤原らんかの4コマ劇場2 (NEWS mook)”]





































「アグレッシブすぎるエンジン」って、どういう感じだったんですかね?
更けあがりが過敏とか、下がスカスカで開けるとドッカンだとか。
ストーナーがテストでそれを指摘してたのに技術陣が無視したとか、そんな記事があったと思ったけど、スペック性能至上主義のホンダがやりそうなミスな気がしました。
ルールは今まで通りで良いと思いますけどね。
そうじゃなきゃ資本の大きいところは、いくらでもやれちゃいますから。
それより、そろそろ最高速を落とすようにした方が良いと思いますね。
確かに360kmは出過ぎですね。レースの面白さにはあまり関係ない。環境にもよろしくないし、何よりライダー側の負担が大き過ぎる。もっとトップスピードを出したいライダーなんて居ないでしょ。まあシャーシ性能に負けてるメーカーはストレートスピードで差を埋めるという考えもあるけど、モトGPはマン島TTじゃないしね。
ロッシでも「最高速は320キロくらいで」と言ってる程ですから。
しかも、あの速度は加速競争の副産物ですから、もうどんだけパワーがあるのかと。
リミッターをつけるのが一番手っ取り早いとは思いますが、やっぱりそうはならないのでしょうね。
変えたかったけど変えられなかったと聞きましたけど、大改造しなきゃいけないレベルのエンジンのアグレッシブさとは一体…
茂木で音を聞いていた限りでは、
ある回転を境に、急激に甲高い音になっていたので、
ホイールスピンが多いと情報と合わせると、
ピーキーなのではと思います。
個人的な勘ですのであしからず。
>みちさん
ある回転をさかいに
もしか2ストでしたか??
・・・な、わけはなく・・・失礼しました。
2スト!カンバーック(2スト乗りの心の叫び!)
ストーナーはフレームがかなり極端な方向性だと指摘しましたが、
スッポさんがいうにはそれはマルケスの好みに合わせた結果だそうで、
結局2014フレームに戻すことになるんですがそれはマルケスの経験不足による開発失敗と言ってましたね。
エンジンについてストーナーは、これぐらいドカに比べりゃ全然マイルド、って言ってましたよw
まっ、一応ストーナーがアグレッシブと言ったという記事はあります。
http://motomoto.hatenablog.com/entry/2015/11/12/093032
ともかく、来年に向けてHRCは問題は山積しているかもしれないですね。
タイヤ 共通ソフト エンジン フレーム
マルケスとペドロサでは、好みもライディングも違うから、どうまとめてくるかですね。
本当、これは正月返上で仕事するのかも。
あらホントだ。
結局、マシンの問題についてはストーナーはすべて指摘済みだったということですね。
意外と開発できますねえ。
シーズン中のインタビューでは
『問題はトラクション不足でエンジンに問題はない』というコメントもありましたが
あれはドカ時代からよく言ってる『文句ばっかり言わずに乗りこなす努力もしろ』というやつだったのかもしれませんねえ。
もはや人間の身体構造では耐えるに、値しないレベルに入ってしまってるのかも知れない。
だから、ヤマハは二輪ライダーロボットの開発へ行ってるのかなぁ~?
たぶん下から上までトルクがありすぎて、スロットルで制御できなかったんでしょう(笑)それを電子制御でコントロールしようとしたけど、良いセッティングができなかったではないですかね??音を聞いても一番高回転まで回してるし、爆発感覚もトルク変動が比較的大きくなるようなタイミングなんじゃないのかな。
実はホンダだけ2ストだったとか…?w
ヤマハはライダーロボットにファクトリーライダーのライディングを入力して、マシン開発に使おうとして居るのかと思ってました。
ロボットならマシン調整してる間電源切っておけばいくら待たしても良いし。
そうすれば今のスペックの中で『必ず』その人が速く走れるバイクが出来る。(理論上だけど)
もしかしたらライダー毎に最適なフレームを積んだマシンとか出てくるかも。
’88NSR500の失敗、再びですね。